

ftCommunity | Suche
Suchergebnisse
Menüpunkte:
![]() Forum
Forum
Kategorien im Bilderpool:
![]() Gleichlauf (11)
Gleichlauf (11)
![]() Hausmodel fuer Siemens Suedafrika um Hausautomatisierung zu zeigen
Hausmodel fuer Siemens Suedafrika um Hausautomatisierung zu zeigen
![]() Rotopod RP1 minimot
Rotopod RP1 minimot
![]() Roboterarm Neu (manuMFfilms)
Roboterarm Neu (manuMFfilms)
![]() 6-Achs-Roboter
6-Achs-Roboter
![]() PneumaCube
PneumaCube
![]() Menschenschleuder
Menschenschleuder
![]() Meißelbagger
Meißelbagger
![]() Programmierung
Programmierung
![]() 5-Achs-Knickarmroboter
5-Achs-Knickarmroboter
![]() (Voll) automatisierter Raupenkran
(Voll) automatisierter Raupenkran
![]() Model 30554: Computing CB 1985
Model 30554: Computing CB 1985
![]() Waschstraße
Waschstraße
![]() Selbststellende Analoguhr mit Miniatur-Uhrwerk
Selbststellende Analoguhr mit Miniatur-Uhrwerk
![]() Niederdruckpresse
Niederdruckpresse
![]() Fanclub-Tag 2009-07-12
Fanclub-Tag 2009-07-12
![]() Inundatie-waaiersluis
Inundatie-waaiersluis
![]() 2 Industriemodelle der 90er Jahre
2 Industriemodelle der 90er Jahre
![]() Zelfbouw pneumatische spier / Pneumatischer Muskel
Zelfbouw pneumatische spier / Pneumatischer Muskel
![]() Katapult-Abschussrampe
Katapult-Abschussrampe
![]() Free-Fall-Tower
Free-Fall-Tower
![]() FT-Muskelmotor
FT-Muskelmotor
![]() Sarja
Sarja
![]() Lenkung durch Gewichtsverlagerung
Lenkung durch Gewichtsverlagerung
![]() Cube Solver WELTREKORDSVERSUCH Peter Pötz i(hman13)
Cube Solver WELTREKORDSVERSUCH Peter Pötz i(hman13)
![]() LKW mit Ladefläche (StefanL)
LKW mit Ladefläche (StefanL)
![]() Obertodesteufelsdriver
Obertodesteufelsdriver
![]() Verschiedene Modelle
Verschiedene Modelle
![]() Baukran von Ma-gi-er
Baukran von Ma-gi-er
![]() 'Super Crane' mit Motoren und IR-Fernsteuerung
'Super Crane' mit Motoren und IR-Fernsteuerung
![]() FT-Convention in Mörshausen 2008
FT-Convention in Mörshausen 2008
![]() Kettenfahrzeug mit Federung und viel Bodenfreiheit
Kettenfahrzeug mit Federung und viel Bodenfreiheit
![]() pneumatischer Kipper
pneumatischer Kipper
![]() verbesserte Version
verbesserte Version
![]() Trein 1
Trein 1
![]() Ferngesteuertes Mehrzweckfahrzeug
Ferngesteuertes Mehrzweckfahrzeug
![]() Moving head mit Scheinwerfer
Moving head mit Scheinwerfer
![]() Swing-Buggy
Swing-Buggy
![]() Fallblatt-Anzeige / Flughafen-Anzeiger
Fallblatt-Anzeige / Flughafen-Anzeiger
![]() Pneumatisches Yo-Yo
Pneumatisches Yo-Yo
![]() Powerkompressor (gummel87)
Powerkompressor (gummel87)
![]() FT-Muskel-Druk-Positie-Regeling
FT-Muskel-Druk-Positie-Regeling
![]() Kameraroboter
Kameraroboter
![]() Portalroboter 3D-XYZ-GES
Portalroboter 3D-XYZ-GES
![]() Aufzug (Dirk Fox)
Aufzug (Dirk Fox)
![]() Helikopter
Helikopter
![]() Flipper
Flipper
![]() non-FFB Racing-Wheel für den PC
non-FFB Racing-Wheel für den PC
![]() Auto mit Kompressor
Auto mit Kompressor
![]() 2.Version des Monstertrucks
2.Version des Monstertrucks
![]() Module von Masked
Module von Masked
![]() Antriebe mit Motor
Antriebe mit Motor
![]() Modelle von Rob van Oostenbrugge (?)
Modelle von Rob van Oostenbrugge (?)
![]() Modelle von Ralf Unruh
Modelle von Ralf Unruh
![]() Trein 2
Trein 2
![]() Pneumatische Fabrik
Pneumatische Fabrik
![]() Achterbahn (mirose)
Achterbahn (mirose)
![]() cat d11t
cat d11t
![]() Achter-Bahn zweispurig
Achter-Bahn zweispurig
![]() Monster-Truck (dasbinich273)
Monster-Truck (dasbinich273)
![]() Achter-Bahn nullgleisig
Achter-Bahn nullgleisig
![]() Planeetwiel-aandrijving
Planeetwiel-aandrijving
![]() Windschiefe Achsen
Windschiefe Achsen
![]() Mechanische Logikgatter
Mechanische Logikgatter
![]() Förderband Lösung (Frits Roller)
Förderband Lösung (Frits Roller)
![]() Seilbahn (mike)
Seilbahn (mike)
![]() Free Fall Tower (tobs9578)
Free Fall Tower (tobs9578)
![]() Neubau 2010-03
Neubau 2010-03
![]() Plotter (Severin)
Plotter (Severin)
![]() Kompressor (uhen)
Kompressor (uhen)
![]() Hinterradgefedertes Auto mit Sturzverstellung
Hinterradgefedertes Auto mit Sturzverstellung
![]() Yoke System
Yoke System
![]() Zahnrad Z50
Zahnrad Z50
![]() Kampfjet
Kampfjet
![]() Gabelstapler (fish)
Gabelstapler (fish)
![]() Segment-en-Schuifstuwen-Robo-Pro-Niveausturing+Handbediening
Segment-en-Schuifstuwen-Robo-Pro-Niveausturing+Handbediening
![]() Flüsterleise präzise mechanische Digitaluhr
Flüsterleise präzise mechanische Digitaluhr
![]() Fußpedale
Fußpedale
![]() Pneumatische Schiebetür
Pneumatische Schiebetür
![]() V1.0
V1.0
![]() Schaufelradbagger 293
Schaufelradbagger 293
![]() Prototyp einer Hängedachuhr
Prototyp einer Hängedachuhr
![]() Centstückzähler
Centstückzähler
![]() Motordraisine
Motordraisine
![]() Flipper (Sebastian)
Flipper (Sebastian)
![]() Kran von Endlich & seinem Bruder
Kran von Endlich & seinem Bruder
![]() Clubmodell 04/1975
Clubmodell 04/1975
![]() Dampfpumpwerk Cruquius
Dampfpumpwerk Cruquius
![]() Umsetzer-Modul
Umsetzer-Modul
![]() Manuelle Sortieranlage (Janft)
Manuelle Sortieranlage (Janft)
![]() Modelle von der Knobloch GmbH
Modelle von der Knobloch GmbH
![]() Bilder zum Sortieren
Bilder zum Sortieren
![]() Modelle von den Brüdern Endlich
Modelle von den Brüdern Endlich
![]() Modelle von Claus Ludwig (claus)
Modelle von Claus Ludwig (claus)
![]() Modelle von Stefan Falk (steffalk)
Modelle von Stefan Falk (steffalk)
![]() fischertechnikluft
fischertechnikluft
![]() Modelle von Ingo Herschel (Udo2)
Modelle von Ingo Herschel (Udo2)
![]() Modelle von Volker-James Münchhof (qincym)
Modelle von Volker-James Münchhof (qincym)
![]() Drucker
Drucker
![]() Prototyp eines Papierschachts für einen Drucker
Prototyp eines Papierschachts für einen Drucker
![]() UP & DOWN Tower Version1
UP & DOWN Tower Version1
![]() Wasserspender 23.08.2010
Wasserspender 23.08.2010
![]() Modelle von Jan Willem Dekker
Modelle von Jan Willem Dekker
![]() Prototyp einer Duplexeinheit für einen Drucker
Prototyp einer Duplexeinheit für einen Drucker
![]() Plotter (ft-tobi)
Plotter (ft-tobi)
![]() Modelle von niekerk
Modelle von niekerk
![]() Dreigang-Schaltgetriebe (Dirk Fox)
Dreigang-Schaltgetriebe (Dirk Fox)
![]() Paketwendeanlage
Paketwendeanlage
![]() Schoonhoven 2010
Schoonhoven 2010
![]() FT-Zeichnungen
FT-Zeichnungen
![]() Magnetanhängerkupplung
Magnetanhängerkupplung
![]() Allrad-Vorne-Hinten-Lenker 2. Versuch
Allrad-Vorne-Hinten-Lenker 2. Versuch
![]() Mini-Kettenkarussell
Mini-Kettenkarussell
![]() Umlauf - Kuppelseilbahn
Umlauf - Kuppelseilbahn
![]() Plotter aus dem Jahr 1991 von tobs9578
Plotter aus dem Jahr 1991 von tobs9578
![]() Gleichlaufgetriebe 'Classic'
Gleichlaufgetriebe 'Classic'
![]() Breakdancer (Johannes93)
Breakdancer (Johannes93)
![]() Panzerwanne/Kettenfahrzeug
Panzerwanne/Kettenfahrzeug
![]() Flipper4
Flipper4
![]() Rund ums Wasser: Transport, Bewässerung, Pumpen
Rund ums Wasser: Transport, Bewässerung, Pumpen
![]() Bewässerungsanlage (Endlich) am 01.01.2011
Bewässerungsanlage (Endlich) am 01.01.2011
![]() 3-achs Roboter mit Förderband (Janft)
3-achs Roboter mit Förderband (Janft)
![]() Doppelkolben-Powerkompressor (Knarf Bokaj)
Doppelkolben-Powerkompressor (Knarf Bokaj)
![]() Erbes-Büdesheim 2012
Erbes-Büdesheim 2012
![]() Schraubenzieher Halter
Schraubenzieher Halter
![]() Infrarot Fernsteuerung
Infrarot Fernsteuerung
![]() Ventilinsel (Frank Jakob)
Ventilinsel (Frank Jakob)
![]() Explorer von PH
Explorer von PH
![]() Lkw mit Tieflader und Gabelstapler
Lkw mit Tieflader und Gabelstapler
![]() SpeedTruck
SpeedTruck
![]() Hubschrauber-Rotor
Hubschrauber-Rotor
![]() Twister
Twister
![]() McDonnell Douglas DC-9
McDonnell Douglas DC-9
![]() UP & DOWN Tower Version3
UP & DOWN Tower Version3
![]() CAT 637C Scraper
CAT 637C Scraper
![]() Bewässerungsanlage (Endlich) am 15.02.2011
Bewässerungsanlage (Endlich) am 15.02.2011
![]() 27.2
27.2
![]() Industrieanlage von PH
Industrieanlage von PH
![]() Nebelmaschinensteuerung
Nebelmaschinensteuerung
![]() In der Endphase
In der Endphase
![]() Airbus A300
Airbus A300
![]() Bewässerungsanlage (Endlich) am 21.05.2011
Bewässerungsanlage (Endlich) am 21.05.2011
![]() Industriemodell V2 (29.05.2011)
Industriemodell V2 (29.05.2011)
![]() Pneumatische Sortieranlage (D.Schwarz)
Pneumatische Sortieranlage (D.Schwarz)
![]() Baustand 3.6.11
Baustand 3.6.11
![]() Fahrgestell 8x4/4, Zugmaschine, unvollendet
Fahrgestell 8x4/4, Zugmaschine, unvollendet
![]() Linktrainer2
Linktrainer2
![]() FT und Google SketchUp
FT und Google SketchUp
![]() Chocolatemaker v2
Chocolatemaker v2
![]() International TD24 Pipe Layer
International TD24 Pipe Layer
![]() Schwebebahn Bauphase 2 (eigentlich 3)
Schwebebahn Bauphase 2 (eigentlich 3)
![]() Flaschenadapter Sigg-Trinkflaschen
Flaschenadapter Sigg-Trinkflaschen
![]() Meine Sonderteile (technikfischer)
Meine Sonderteile (technikfischer)
![]() Apollo 11
Apollo 11
![]() Plotter (majus)
Plotter (majus)
![]() FT-Brückenlegepanzer-Biber (peterholland)
FT-Brückenlegepanzer-Biber (peterholland)
![]() Murmelbahn Fast&Slow
Murmelbahn Fast&Slow
![]() Shuttleachterbahn (Kieseleck)
Shuttleachterbahn (Kieseleck)
![]() Kleinstkupplung
Kleinstkupplung
![]() Micro-RC-Truck
Micro-RC-Truck
![]() Tieflader (majus)
Tieflader (majus)
![]() großer pneumatischer Radlader (Vorbild: Caterpillar Cat992G)
großer pneumatischer Radlader (Vorbild: Caterpillar Cat992G)
![]() TollkühneMännerInIhrenFliegendenKisten2
TollkühneMännerInIhrenFliegendenKisten2
![]() Druckluft-Lok
Druckluft-Lok
![]() Transport- und Lagersystem (Fredy)
Transport- und Lagersystem (Fredy)
![]() Kehrmaschine mit Antrieb (mbartelt)
Kehrmaschine mit Antrieb (mbartelt)
![]() Aufzug mit 4 Etagen
Aufzug mit 4 Etagen
![]() Marcel & Tobias Endlich
Marcel & Tobias Endlich
![]() Allrad-Teleskop-Mobilkran
Allrad-Teleskop-Mobilkran
![]() Familie Fox
Familie Fox
![]() Andreas Gürten
Andreas Gürten
![]() FT-Brückenlegepanzer-Biber
FT-Brückenlegepanzer-Biber
![]() Segway
Segway
![]() Teleskop-Studie
Teleskop-Studie
![]() Pneumatische Stempelmaschine
Pneumatische Stempelmaschine
![]() 3 Stöckiger Aufzug (FT-FAN)
3 Stöckiger Aufzug (FT-FAN)
![]() Minimalistischer Präzisionsplotter (Dirk Fox)
Minimalistischer Präzisionsplotter (Dirk Fox)
![]() Truck - "gepimpte" Version des "King of the Road"
Truck - "gepimpte" Version des "King of the Road"
![]() Belastungsgrenze
Belastungsgrenze
![]() Minimalistisches Servo-Fahrzeug
Minimalistisches Servo-Fahrzeug
![]() Bomben-Entschärfungs-Roboter von PH
Bomben-Entschärfungs-Roboter von PH
![]() Wechsellader auf Zetros-Basis
Wechsellader auf Zetros-Basis
![]() Cat 24H aufgebaut
Cat 24H aufgebaut
![]() 3D-Scale-Studie Schnellzuglok BR 03 Witte
3D-Scale-Studie Schnellzuglok BR 03 Witte
![]() Freefall-Tower von ftFabian
Freefall-Tower von ftFabian
![]() SpyCam
SpyCam
![]() Geldautomat von Endlich
Geldautomat von Endlich
![]() Vermessungsroboter
Vermessungsroboter
![]() Dreigang-Schaltgetriebe mit Differential (Dirk Fox)
Dreigang-Schaltgetriebe mit Differential (Dirk Fox)
![]() Telekopischer Antrieb Teilen mit längenausgleig
Telekopischer Antrieb Teilen mit längenausgleig
![]() Farbsortiermaschine mit Palettenladeeinrichtung
Farbsortiermaschine mit Palettenladeeinrichtung
![]() Karussell, SuperWirbel
Karussell, SuperWirbel
![]() 3-Zylinder Druckluftmotor
3-Zylinder Druckluftmotor
![]() Blattfeder
Blattfeder
![]() Über - und Unterdruckbehälter
Über - und Unterdruckbehälter
![]() riesen LKW
riesen LKW
Bilder im Bilderpool:
 Übersichtsbild ganzer Schachroboter (uffi) Schachroboter mit Scara Arm und Zugerkennung durch Bildverarbeitung Kommentare: 0 |
 Kamerahalterung mit Gegenstück auf der Kamera (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Kamerahalterung (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Spiegelreflexkamera EOS (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Kamerahalterung oben (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Rolle Plotterpapier (DirkW) Modelle fotografieren und filmen Kommentare: 0 |
 Modellbaumesse Wien 2018 (markus wolf) Modellbaumesse Wien 2018 Kommentare: 0 |
 Hinterachse 2 (Martin Wanke) Chassis für Geländewagen II Kommentare: 0 |
 Vorderradaufhängung 1 (Martin Wanke) Chassis für Geländewagen II Kommentare: 0 |
 Vorderradaufhängung 2 (Martin Wanke) Chassis für Geländewagen II Kommentare: 0 |
 Vorderradaufhängung 3 (Martin Wanke) Chassis für Geländewagen II Kommentare: 1 |
 Nachtrag Wellenversteifung (Martin Wanke) Chassis für Geländewagen II Kommentare: 0 |
Downloads:
| Bezeichnung | Autor | Format | Beschreibung | Größe | Datum |
| FreeSpeedJoy | Markus Mack | Die beliebte Software zur Joysticksteuerung - leicht zum Einstellen und flexible Funktionsweise Mehr Informationen Eine ROBO-Version wird demnächst freigegeben, diese wird auch den RF Data Link unterstützten. (wer Lust hat zum Testen dieser Version kann sich bei MarMac melden) |
44 kB | ||
| Teleskopmontierung | Martin Romann | Bau einer schrittmotorgetriebenen alt-azimutalen Montierung für ein Teleobjektiv. | 511 kB | ||
| FreeSpeedSpeech | Markus Mack | Mithilfe dieser Software und einem Spracherkennungsprogramm können Sie Modelle sprachsteuern! (Kann auch als Tastatursteuerungsprogramm dienen) Mehr Informationen |
36 kB | ||
| Schritt | Holger Howey (fishfriend) | Ansteuerung von Schrittmotoren, Beschreibung | 16 kB | ||
| ARS (Aktuatoren Reaktionen Sensoren) | Martin Romann | Elektronische Baugruppen mit CMOS-ICs zur Steuerung und Regelung von Maschinen. Schaltungen für u.a: Entprellte Taste, Power-on-Reset, Flankendetektor, Richtungserkennung oder Schrittmotorsteuerung |
1.29 MB | ||
| Der Umgang mit Interrupts | Martin Romann | Martin Romanns Abhandlung und wissenschatliche Dokumentation zum Umgang mit Interrupts | 26 kB | ||
| Grundbaustein | Michael Becker | 39 kB | |||
| Grundbaustein GB-H4 | Thomas Kaiser | 142 kB | |||
| Doppelaufzug | Uwe Timm | Für das Hauptprogramm und etliche Unterprogramme sind unter "Beschreibung" Hinweise und Kommentare hinterlegt. Genauere Infos zum Modell gibt es im Forum. |
112 kB | ||
| Cube Solver | Markus Mack | Steuerungsprogramm des Cube Solver-Roboters, mit Algorithmus und Farberkennung. Zum größten Teil grob dokumentiert, eine "Anleitung" zum evl. Verwenden des Algorithmus mit einem anderen Roboter liegt bei. Genaueres zum Projekt siehe Forum. Benötigt aktuellste RoboPro-Version! |
294 kB | ||
| Kettenförderwerk | Thomas Habig | Dabei handelt es sich um ein Modul, welches in meinem Industriemodell zur Convention 2004 eigebaut war. Es dient zur Beförderung von Werkstücken, die in einer Taktstraße an verschiedenen Stationen bearbeitet werden. Das Laufwerk kann bautechnisch an jede Situation individuell angepaßt werden. | 1.45 MB | ||
| 30160 50s/1 | unbekannt |  |
1.07 MB | ||
| 30161 50s/2 | unbekannt |  |
879 kB | ||
| 30162 50s/3 | unbekannt |  |
867 kB | ||
| 30150 50s | unbekannt |  |
906 kB | ||
| 30120 50 | unbekannt |  |
1.07 MB | ||
| 30140 50/1 | unbekannt |  |
885 kB | ||
| 30141 50/2 | unbekannt |  |
938 kB | ||
| 30142 50/3 | unbekannt |  |
841 kB | ||
| 30140 Motor & Getriebe | unbekannt |  |
1.48 MB | ||
| 30061 100s | unbekannt |  |
4.42 MB | ||
| 30062 200s | unbekannt | |
4.42 MB | ||
| 30063 300s | unbekannt | |
4.42 MB | ||
| 30091 mot 1 | unbekannt |  |
629 kB | ||
| 30149 Statik | unbekannt |  |
2.10 MB | ||
| 30154 Statik 1 | unbekannt |  |
1.55 MB | ||
| 30158 Statik 2 | unbekannt |  |
1.38 MB | ||
| 30165 Statik 3 | unbekannt |  |
1.50 MB | ||
| 35791 MasterPlus Special Trucks | unbekannt |  |
4.31 MB | ||
| 30314 MasterPlus Trucks | unbekannt |  |
1.49 MB | ||
| Statikhilfe | Thomas Habig | Wer schon einmal verstrickte Statikmodelle konstruiert hat, wird sich oftmals daran gestört haben, immer und immer wieder mit dem Taschenrechner eine bestimmte Strebenlänge für irgendeine Diagonale berechnen zu müssen. Ich habe diesbezüglich vor geraumer Zeit eine Tabelle zusammengestellt, in der sämtliche Kombinationen aus Streben und Laschen aufgeführt sind. Darüber hinaus werden im 2. Teil alle möglichen Diagonalabstände in vielen erdenkli- chen Varianten korrekt berechnet und chronologisch dargestellt. |
177 kB | ||
| 30120 Grundkasten 50.xls | 650 kB | ||||
| 30130 Grundkasten 50.xls | 653 kB | ||||
| 30150 Statik Grundkasten 50S.xls | 753 kB | ||||
| 30150 Statik-Grundkasten 50S.xls | 754 kB | ||||
| 30230 em1 Elektromechanik-Grund.xls | 731 kB | ||||
| 30250 ec1 Elektronik-Grund.xls | 649 kB | ||||
| 30270 Funkfernsteuerung.xls | 271 kB | ||||
| 30270-375 Funk-Fernsteuerung, komplett.xls | 912 kB | ||||
| 30250 ec 1 - Elektronik Grund.xls | 276 kB | ||||
| Industrieroboter mit 10 Lagerplätze und Förderband | Erwin Kneubuehl | Programm für 10 Lagerplätze und aus-eingabe Förderband. | 1.09 MB | ||
| Simple I/O | thkais | Die Programmierung der Ein- und Ausgänge des RoboInterface in C ist etwas kryptisch. In der Zip-Datei befinden sich Subroutinen, die die Ansteuerung vereinfachen. | 43 kB | ||
| Using the distance sensor on a 'car' | Richard R. Budding | This program is using I1 for activating the Distance sensor I2 to stop the distance sensor I3 to start the 'car' using M4 if the 'car' robot is running close to a wall (50cm), use 3 seconds to stop. with the sequence Speed=8, 6, 4 and 2 followed by STOP M4. |
102 kB | ||
| Not-Aus | Markus Mack | Primitives Notaus-Unterprogramm, das die Motoren in einem eigenen Prozess in einer Endlosschleife ausschaltet. Achtung: Funktioniert nicht, wenn irgendwo anderes ein Motor in einer (schnellen) Endlosschleife eingeschaltet wird. Ein Reset ist möglich, indem man das Unterprogramm so erweitert, dass die Endlosschleife beim Druck eines anderen Tasters abbricht und wieder auf den Notaus wartet. Die Motoren, die vorher liefen, wieder automatisch einzuschalten geht nicht ohne weiteres. Wenn mehr Ausgänge als M1-M4 verwendet werden, muss das Unterprogramm entsprchend erweitert werden. |
2844 Bytes | ||
| Poti-Lenkung | Stefan Lehnerer | Programm von meinem Unimog mit Poti-Lenkung und Geschwindigkeitssteuerung. | 168 kB | ||
| Funktionstüchtige Anfahrts- und Brems- | ffcoe / chris | Die Positionierungseinhiet von RoboPro wurde so erweiter, dasnun die Motoren am anfang der Strecke Beschleunigt und am Ende der Strecke abgebremst werden können. Eine ausführliche Beschreibung zu jedem Unterprogramm findet ihr in dessen Beschreibung im Programm. |
335 kB | ||
| 6392421, Fischertechnik, 3-6, Windmuehle + Schneepflug | Ruebe | 1.14 MB | |||
| 6392451, Fischertechnik, 3-6, Betonmischer + kleine Walze | Ruebe | 1.92 MB | |||
| 6392401, Fischertechnik, 3-6, Helikopter + grosse Walze | Ruebe | 2.01 MB | |||
| 6392441, Fischertechnik, 3-6, Fabrik + Lastwagen | Ruebe | 1.22 MB | |||
| 6392411, Fischertechnik, 3-6, Aussichtsturm + Schrank | Ruebe | 2.90 MB | |||
| Universelles Schrittprogramm | Lothar Vogt Pilami | einfaches, universielles Schrittprogramm für sequentielle Abläufe. Es lassen sich Lauflichter, Industriesteuerungen, usw. realisieren. Die Schrittanzahl läßt sich jederzeit kürzen oder erweitern. Im Beispielprogramm liegt ein fester Zeittakt auf der Schrittkette, sodass sie kontinuierlich durchläuft (Lauflicht). Dies läßt sich aber ebenfalls anpassen. |
0 Bytes | ||
| Schrittberechnung für Viertelkreisbogen | Thomas Brestrich (schnaggels) | Erstellt von Thomas Brestrich nach Erläuterungen von Martin Roman im Fischertechnik-Forum im Artikel http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=863 Ursprünglich zur XY-Ansteuerung eines Werkzeugs für einen Halbkreis gedacht, kann das Excelsheet die Schritte der Motoren in XY-Richtung für eine Ansteuerung über ein Schneckengetriebe universal berechnen. |
157 kB | ||
| Codewheels und Codestrips | Remadus | ps | Diese Postscript-Datei erstellt Codewheels und Codestrips für Postscript-Drucker. Die Anzahl der Linien, Durchmesser, Liniendichte usw. muß man in der Datei selbst eingeben. |
6926 Bytes | |
| ROBO Pro Fernsteuerung | Paul Nehlich | Software für Raupenfunktion ROBO Interface (Handsender) Ausgelegt für "einfacher Roboter"/ "Basismodell"(beides aus beschreibung ROBO Mobile Set) Oder jeden Fahrroboter mit zwei Einzelansteuerbaren Rädern. |
103 kB | ||
| 5 und 12V Pneumatik Magnetventiele, passend für Fischertechnik. | Peter Damen (Poederoyen, Holland) | Bei SensorTechnics ( www.sensortechnics.com ) gibt es 5 und 12V Pneumatik Magnetventiele, passend für Fischertechnik. Sensortechnics GmbH Boschstr. 10 82178 Puchheim Deutschland Telefon: +49 (89) 80083-0 Fax: +49 (89) 80083-33 V2-valves: V2-13-3-PV-12-F-8-8 á 22,30 Euro/st eignen sich sehr gut für Fischertechnik. Weil es 3 Anschlusse gibt, statt nur 2 wie beim öriginal FT-Magnetventilen, gibt es mehrere möglichkeiten. Positionierung der Zylinder ist leichter. |
251 kB | ||
| Using the distance sensor with 'anti-Geräusche' | Richard R. Budding | http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=989 How to use the ultra sonic distance sensors. If connected to the A1 or 2 eingang the signal has too much 'Geräusche'. In order to stablize and utilze it better you'll have to use some average algorithm. Herby the solution... have fun, richard |
131 kB | ||
| Getränkeautomat-Steuerung | Jan Knobbe | Modell siehe Bilderpool |
41 kB | ||
| Beschleunigen und Bremsen | Thomas Brestrich (schnaggels) | einfaches Beispiel für Beschleunigen und Bremsen von Motoren (ohne Synchronisierung der Geschwindigkeit) | 95 kB | ||
| 6Stockaufzug | michael K. | Das ist ein ganz einfaches Steuerungsprogramm für einen 6Stockauzug. Es ist praktisch beliebig erweiterbar. | 138 kB | ||
| Nachbildung E-Tec Programme | Clemens (Clemy) | Diese Bibileothek enthält Nachbildungen der Programme aus dem E-Tec. Leider habe ich das Programm "Wechselblinker" nicht hinbekommen |
587 kB | ||
| Flip-Flop Unterprogramm-Library | Alfred Svabenicky | Die wichtigesten, grundlegenden Flip-Flop-Typen (RS, RS-MS, JK-MS, D, T) in einer Library. | 434 kB | ||
| Druck conversion tables | Peter Damen (Poederoyen, Holland) | Druck conversion tables | 45 kB | ||
| Wetterstation | Niklas Frühauf | A1->Solarzelle I1->Taster mit Impulsrad, an "Windmühle" angeschlossen AX->Temperatursensor mit Max&Min-Werte-Speicherung |
579 kB | ||
| Flipper-Steuerungsprogramm | 1.04 MB | ||||
| Flipper Version5 | Niklas Frühauf | Neu:Anzeigeverbesserung, keine Programmierfehler mehr | 1.04 MB | ||
| Raupensteuerung für RoboIF | Martin Giger (Ma-gi-er) | Dieses Programm wurde ursprünglich für einen Rasenmäher gemacht, ist aber eigentlich wie mit dem IR-Empfänger. im Bedienfeld findet man, wenn man keine Fehrnsteuerung hat, eine Steuerungsoberfläche. | 247 kB | ||
| Tresor-Steuerung | Niklas Frühauf | Tür wird über Magnetventile und Elektromagnet verriegelt, bei Eingabe von 25963 öffnet sie sich | 193 kB | ||
| Durchschnitt ausrechner | fitec | Das ist ein Programm welches den Durchschnitt eines Lichtwertes ausrechnen soll. Es funktioniert leider noch nicht. Weil die Erklärung im Forum etwas schwer zu verstehen ist schaut es euch einfach mal an. | 45 kB | ||
| FreeSpeedJoy - USB | Markus Mack | Da doch ab und zu jemand danach fragt: Hier eine Vorab-Version meiner Joystick-Steuerungssoftware, die auch über USB, und theoretisch sogar mit dem Data Link per Funk, funktionieren sollte. Achtung: Soweit ich weiß funktioniert die Endtaster-Abschaltung mit dieser Version nicht. Enthält den umfish-Treiber von Ulrich Müller, http://www.ftcomputing.de |
67 kB | ||
| ft Näherungsschalter 36237 | xbach | NAMUR Sensor | 570 kB | ||
| Joysticksteuerung in Freebasic | Werner Hobelbrecht | Mit dem PC-Joystick kann man seine Modelle steuern und die Eingänge beobachten. Die Sourcen und die Anbindung an Freebasic sind mit dabei. |
176 kB | ||
| Pneumatik Shot 'n Drop mit CNY-70 & Laufrolle zum Zylinder-Positionierung. | Peter Damen (Poederoyen NL) | Pneumatik Shot 'n Drop mit CNY-70 & Laufrolle zum Zylinder-Positionierung. Optimiertes Programm |
144 kB | ||
| Trickfibel | Thomas Habig | Sammelsurium rund um FT und Elektronik |
1.85 MB | ||
| löscht ein beliebiges Element einer Liste | Thomas Brestrich (schnaggels) | Realisierung als UP mit Ein- und Ausgang für eine Liste zur einfachen Verwendung in einem eigenen Programm (funktioniert sowohl mit dem ersten als auch mit dem letzten Element einer Liste!) | 119 kB | ||
| löscht das erste Element einer Liste | Thomas Brestrich (schnaggels) | Realisierung als UP mit Ein- und Ausgang für eine Liste zur einfachen Verwendung in einem eigenen Programm | 90 kB | ||
| Drehzahlmessung für Getriebemotore | Werwex | Hier meine Lösung der Drehzahlmessung. Er misst alle 2,5 s und aktualisiert die Anzeige. Zugegeben es sind durch den kurzen Zeittakt Ungenauigkeiten möglich. Gruß werwex |
92 kB | ||
| Drehzahlmessung für Getriebemotore | Werwex | Hier meine Lösung der Drehzahlmessung. Er misst alle 2,5 s und aktualisiert die Anzeige. Zugegeben es sind durch den kurzen Zeittakt Ungenauigkeiten möglich. Gruß werwex |
92 kB | ||
| Tempautomat Steuerung | Franky (Frank Hanke) | Damit soll der Temptaschentuchautomat (Clubmodell aus 2004) gesteuert werden. Leider funktioniert das Blinklicht nicht im Offlinemods. Ist das Interface mit dem PC verbunden, klappt alles wunderbar. Nach dem runterladen, blinken die Lampen nicht. | 115 kB | ||
| Normal -->Binärsystem Rechner | Niklas Frühauf | Programm rechnet natürlcihe Zahlen bis zu 2^26 in Binärsystem um. System: Zahl wird durch aktuelle 2er Potenz geteilt, das Ergebnis abgerundet und der Rest ausgerechnet, mit dem dann auch so verfahren wird. Außerdem wird der Verlauf in einem Diagramm mit Logarithmischer Skalierung angezeigt |
27 kB | ||
| zyklisch variables Getriebe / Pedalantrieb | Wihelm Klopmeier | (Aus einer email von Wilhelm Klopmeier): Mit dem Getriebe soll die Leistungsabgabe des menschlichen Körpers verbessert werden. Nach meinen Überlegungen und nach einer Recherche sportmedizinischer Untersuchungen kann eine Verbesserung von ca. 10% erreicht werden. Problematisch ist aber noch eine praxistaugliche Konstruktion - die auftretenden Kräfte sind erheblich. Die Unterlagen halte ich jedoch zunächst zurück, damit eine Diskussion nicht beeinflußt wird. |
1.63 MB | ||
| Maske-Robot Wolf Rotkäppchen | Peter Damen (Poederoyen NL) | "Bor de Wolf" heeft o.a. de volgende aantrekkelijke zeer compakte bloeddrukmeter-onderdelen (<15 Euro) : compressor, magneetventiel, en drukzak met instelbaar overdrukventiel. Een Conrad-voice-module trigger ik via de RoboPro-interface om de Bor de Wolf naar Roodkapje en de 7 geitjes te laten vragen................. Ik laat hem het volgende uitvoeren: -op en neer lopen (ijsberen) -draaien met lijf -lijf/hals naar voren en achteren -bek open en dicht (stevig bijten) -rug opzetten d.m.v. compressor, magneetventiel, en drukzak -praten, roepen en huilen d.m.v. Conrad-voice-module |
618 kB | ||
| Inhalt Hobby-Bücher | Andreas - Laserman | Erst mal ein Dank an Thomas Kaiser, für sein Gigantisches Werk, 18 Bücher einzuscannen mit jeweils 100 Seiten. Das macht 1800 Seiten!!! Damit hat er viele schöne Modelle der Nachwelt erhalten. Hier kann man sich die Bücher runterladen: http://www.ft-fanpage.de/FT/hobby_.htm Außerdem den gleichen Dank an Edgar Hofer, dessen Werk man sich hier im Forum runterladen kann unter ==> Downloads ==> Bauanleitungen ==> Hobbybücher In meiner Datei finden sich nun alphabetisch geordnet die 887 Modelle aus den Büchern. Vom Addierenden Zählwerk bis hin zur Zeitmeß-Anlage. Mit zuordnung, in welchem Buch man das Modell findet. Vieles was man sucht, wurde schon einmal ca. 1960-1970 von Arthur Fischer vorgestellt!!! Man versteht Dinge aus dem Alltag, wie z.B. KFZ-Technik, Elektronik-Schaltungen, und vieles vieles mehr!!! |
96 kB | ||
| Kantenerkenner (Mobile RobotsII) | Manuel Neumann | Das ist das Programm was ich für den Kanntenerkenner geschrieben habe. | 153 kB | ||
| Material-Aufzug | Laserman | Das Programm enthält eine Routine zur Überprüfung der Drehrichtung ==> Ist der Aufzug z.B. im dritten Stock, und es drückt jemand im Erdgeschoß den Rufknopf, dann muß der Aufzug "runter" fahren. Klingt erst mal logisch. Aber die Umsetzung ist gar nicht so einfach... | 7303 Bytes | ||
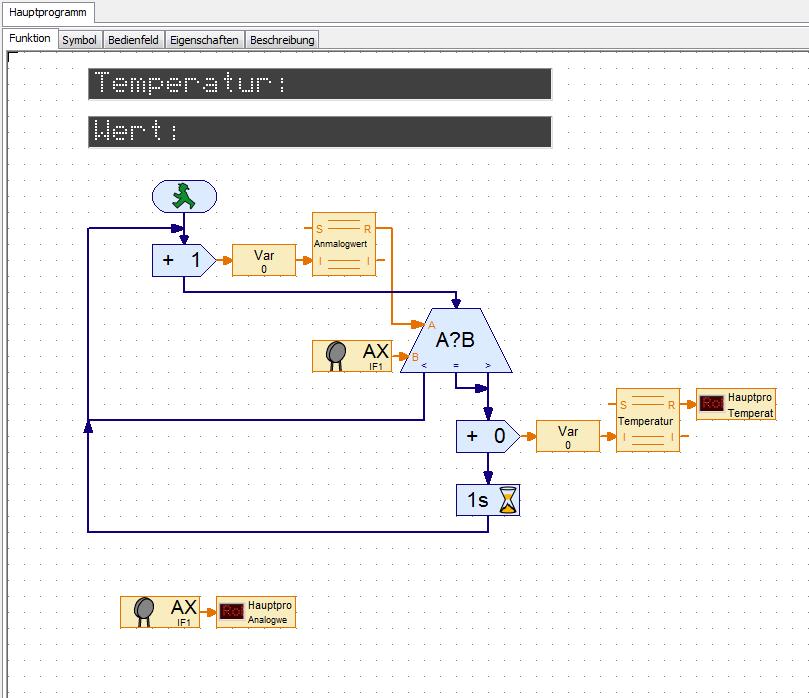
| Umrechnung IF-Wert -> Temperatur | equester | Das Programm wandelt den analogen Wert des NTC-Widerstands in die passende Temperatur um. Dabei verwendet es Listen, die sich auf meine Messwerten zum NTC berufen (siehe Downloads "NTC-Wärmesensor ft"). | 0 Bytes | ||
| Fischertechnik Bruglegger-tank M48 met schaarbrug | Peter Damen (Poederoyen NL) | doc | Ik heb geprobeerd deze bruglegger-tank M48 met schaarbrug met Fischertechnik na te bouwen. Via Google was het buitengewoon eenvoudig binnen 3 minuten een zeer gedetailleerde technische handleiding te downloaden. Vervolgens ben ik aan de gang gegaan. De grote optredende krachten, alsmede de beperkingen van bepaalde Fischertechnik-onderdelen zijn het grootste struikelblok geweest bij de bouw van de bruglegger-tank M48 met schaarbrug. |
214 kB | |
| Toelichting programma + opbouw FT-model: | Peter Damen (Poederoyen NL) | doc | Fischertechnik-Wolf-robot, geïnspireerd door onze vakantie in mei 2008 in het Sauerland (=Rotkäppchenland) en eerdere bezoeken aan de Efteling. Ik kan hem geprogrammeerd de volgende zaken laten uitvoeren: -op en neer lopen (ijsberen) -draaien met lijf -lijf/hals naar voren en achteren -bek open en dicht (stevig bijten) -rug opzetten d.m.v. compressor, magneetventiel, en drukzak -praten, roepen en huilen d.m.v. Conrad-voice-module |
3.38 MB | |
| Teilen + Runden | nula | Ein UP welches eine Zahl durch eine andere teilt und rundet auf eine gerade Zahl. Der Operator Teilen bei RoboPro rundet nur ab, dieses UP ab ,5 auf. | 70 kB | ||
| Digitaluhr in RoboPro | Laserman | Die Anzeige befindet sich im Bedienfeld des Hauptprogramms. Wenn man nicht alle 6 Ziffern sieht, muß man mit der kleinen Lupe etwas herauszoomen. Nach dem Start des Programms dauert es etwa 20 Sekunden, bis die Uhr loslegt (warum auch immer). Dann kann die Uhr mit den Knöpfen gestellt werden. Allerdings müssen diese etwa 1-2 Sekunden gedrückt, und anschließend wieder losgelassen werden. Im Hauptprogramm befinden sich Routinen zur Zeit-Erstellung, Stellen der Uhrzeit und Aufruf von diversen Unterprogrammen. Die Uhr läuft nicht ganz exakt. Aber man kann schön sehen, was so alles dahinter steckt... |
161 kB | ||
| UP für Flankenerkennung mit Timeout | Thomas Brestrich (schnaggels) | Erster Versuch noch mit Debug Variablen im UP, angeregt durch eine Diskussion im Forum: http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=3310 und http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=3311 |
121 kB | ||
| Segmentscheibe für Gabellichtschranke | Andreas Gürten | Mit diesem Excel-Programm kann man Segmentscheiben erstellen mit 2 bis 120 Segmenten. Einfach die entsprechende Anzahl Segmente in den Rahmen eintragen. Die Segmentscheibe kann man dann in beliebiger Größe ausdrucken. Hierzu in das Register Druckansicht gehen und auf den Button drücken, um die Größe zu verändern. Wenn man das Voreingestellte Maß von 20 mm beibehalten will, braucht man nur in diesem Register (Druckansicht) auf Drucken zu gehen. |
73 kB | ||
| Berechnung von Drehzahl und möglichen Impulsen | Thomas Brestrich (schnaggels) | Mal ein Versuch das rechnerisch anzugehen. Die gelben Felder sind für Eingaben gedacht, die Drehzahlen der Motoren sind ja Spannungsabhängig und ich habe einen Wert für etwa ein volles Akkupack genommen. Mit Netzteil halt mehr. Fehler und Amerkungen bitte im Forum unter z.B. http://www.fischertechnik.de/de/fanclub/forum/default.aspx?g=posts&t=3364 posten | 78 kB | ||
| UP für Flankenerkennung mit Timeout v2 | Thomas Brestrich (schnaggels) | optimierte Variante, die Version mit debug im Namen wartet länger und zeigt alle Variablen an. Links im Forum siehe oben, Fehler/Wünsche bitte melden :) | 13 kB | ||
| Türme von Hanoi mit Altem Kasten 30554 | Andreas Gürten | Roboterpositionierung über Poti! Den Poti für Hoch und Runter braucht man nicht. Es gibt ein Programm für Handbetrieb. Und ein Programm für Automatikbetrieb. Man startet das Programm. Der Roboter Initialisiert. Dann schiebt man 2 bis 5 Scheiben in Position. Stellt am Regler ein, wieviel Scheiben es sind und drückt den Start-Knopf. Evtl. müssen die Werte angepaßt werden. Poti und Roboterarm in Mittelstellung bringen und dann mit Seiltrommel fixieren. |
45 kB | ||
| Bogenbrücke | Thomas Habig | doc | Nachbau der Bogenbrücke einer historischen Anleitung in neuem Design mit diversen Erweiterungen und Ergänzungen. |
482 kB | |
| Rätselsammlung | Thomas Habig | Rätsel und Knobelleien rund um fischertechnik. Viel Spaß beim lösen! |
601 kB | ||
| serial.c simple demo of the serial interface in C | Ad van der Weiden | c | This example program shows how to use the serial interface on the RoboInterface in the simplest way. That means no interrups, no buffering, nothing. By way of example we output a memory range as a motorola S file to a the PC. If you have a terminal emulator like Putty (freeware) you can capture the output and save it to a .mot file. This file you can inspect in a text editor or, when you remove the header line from putty, even load it as a module in the Renesas debugger! This will open a whole new world of possibilities. |
4230 Bytes | |
| Drucker ohne Tinte (Funzt nur mit zB. Sift) | Jonas Fischer | -> ließt daten aus Exel Tabelle aus. (1.Spalte x-achse 2. Spalte y-achse 3. Spalte farbintensitet (wie dunkel)) -> funzt mit lötzinn (getested) -> powered and Copyrighted by Fijo © 2009 |
165 kB | ||
| Kaputte Programmierung zur Verknüpfung zweier Werte | Patrick P. | jpg | Das ist eine nicht funktionstüchtige Programmierung zur verknüpfung von zwei Werten. | 71 kB | |
| ABS-Antiblockersystem | Peter Damen (Poederoyen NL) | Beim heutigen ABS-Programm FTC-UM: http://www.ftcomputing.de/abs.htm gibt es nur Scheibe Halt | Dreht | Halt | Dreht | Halt | Dreht ....(=Stotterbrems), ...usw. , ohne das die Reife nach Z.b. 8 sec wirklich halt wie es normal bei ABS in wirklichkeit gibt. Mit eine Auslauf-Schleife (lokale Variable) über Geschwindigkeit M2 is das Modell etwas realistischer. In Praxis ist alles doch nicht so einfach, da auch der Brems(Luft)druck dosiert wird. Gruss, Peter |
96 kB | ||
| Use Control set with RoboPro on Robo Interface | Ad van der Weiden | contains the .hex file with the handler and an example .rpp file as well as all the sources. See the readme file for installation instructions. |
117 kB | ||
| Fischertechnik Inundatie-waaiersluis | Peter Damen (Poederoyen NL) | doc | "Eine Waaierschleuse ist eine spezielle Schleuse, die gegen den Wasserdruck geöffnet und geschlossen werden kann. Dieser Schleusentyp wurde von Jan Blanken (NL, 1755-1838) erfunden." Het bijzondere van een (inundatie-) waaiersluizen is gelegen in het feit dat de sluisdeuren door omloopriolen met schuiven, ook tegen hoog water in, kunnen worden geopend of gesloten, zelfs tegen de stroom in. |
2.67 MB | |
| Industry Robots 3Achser | Laurens Wagner | Dieses Programm ist ein Steuerungsprogramm für den 3-Achs Roboter aus dem Industry robots Set.mit Lageregler und Co. | 573 kB | ||
| Druckregulierung Pneumatik Muskel stabil machen | Peter Damen (Poederoyen NL) | Ich versuche mit Robo-TX eine stabiele Druckregulierung für eine Pneumatik Muskel zu programieren. Ziel ist mit ein Pot-Meter eine stabile Luftdruck zu realisieren, damit die Pneumatik Muskel eine feste einstellbare Verkurzung hat. Es gibt eine feste Zusammenhang schwischen den Druck und die Länge einer Pneumatik Muskel. Problem is aber : Fast immer gibt es eine Abweichung zwischen der Potmeter-einstellung und der Drucksensor. Das Programm wird schell instabil. In die Niederlände sagt man: das Programm "Jo-Jo-t". Beim Pneumatik Muskel gibt es dann immer Pressluft-Zufür via O1 oder Pressluf-Abfür via O2. Eine Druck-range (etwa 200 mBar = 0,2 Bar) wobei gar nichts passiert wäre o.k. Wenn das Unterschied (Differenz) zwischen die Drucksensor-druck und Pot-meter grösser ist als 200 mBar, nur dann muss Pressluft zu- oder abgeführt werden. Wie ist solch eine stabiele Regulierung realisierbar ? ........es gibt in Robo-Pro kein standard -Vergleichung für dieses Problem. |
70 kB | ||
| Aufzugssteuerung | Frank Jakob | Steuerung für meinen Aufzug mit 4 Haltestellen. Langsames Anfahren und-Anhalten mit Impulszähler an der Motorwelle. | 1.19 MB | ||
| Plotter Treiber | Severin | X und Y Werte haben ihre eigenen Listen. Das Programm gibt nimmt den kürzesten Weg zwischen der aktuellen und der gewünschten Position. Die Konstante am Unterprogramm "Rechner" gibt die maximale Schrittgeschwindigkeit an. Das Programm kann, über die Variablen X-Schub und Y-Schub, die Figur, verschoben, beliebig oft zeichnen. Sieht bei einfachen Figuren gut aus. Über die Maximalgröße der Listen kann eigestellt werden wie oft die Figur verschoben wird. Hat die Figur 4 Koordinaten und soll 4 mal verschoben gezeichnet werden, muss der Maximalwert einer Liste der X oder Y Achse 16 sein. Wenn die Figur nur einmal gezeichnet werden soll 4. Mit 0 ist der Stift oben, mit 1 auf dem Blatt. Im Unterprogramm "Stift" kann die Mechanik der Stiftehalterung eingestellt werden. Es muss für jede Koordinate Angegeben werden in welche Position sich der Stift befindet. Über X-Max und Y-Max muss die Auflösung vom Plotter angegeben werden. z.B.: 1000x570 Sollte der Plotter einen Befehl bekommen der über dem der Auflösung ist, wird dieser nicht ausgeführt und das Programm beendet. |
0.99 MB | ||
| PolarFish - Ansteuerung des Plotters von 1985 | Marcus Schulz | Mit der Software lässt sich derzeit der Plotter ansteuern. Zwei vordefinierte Shapes lassen sich plotten. Befindet sich in er Entwicklung, wird ständig erweitert. Die aktuellste Version finder sich immer unter: http://polarfish.sourceforge.net |
1.79 MB | ||
| Warum funktioniert das Programm nicht? | Patrick P.^ | Ich habe das Programm so eingestellt, dass man theoretisch Robo IF und TX Controller zusammen in einem Programm programmieren könnte, aber leider klappt das nicht. Wäre nett, wenn jmd. eine Idee hat. Patrick |
13 kB | ||
| selbstbaufarbsensor | maddin | 2 abfrage programme, aufbauzeichnung und tips bzw anleitung mehr infos zt in den beschreibungen der programme ps.: wenn sich verbesserungsvorschläge ergeben nicht zögern |
43 kB | ||
| selbstbaufarbsensor | maddin | 2 abfrage programme, aufbauzeichnung und tips bzw anleitung mehr infos zt in den beschreibungen der programme ps.: wenn sich verbesserungsvorschläge ergeben nicht zögern |
43 kB | ||
| JoyTx | Laurens Wagner | Programm zur Steuerung eins Fischert. >TX Controllers mit ein aus Fischertechnik gebauten Joystick am ROBOIterface | 479 kB | ||
| Teach-In Roboter aus FT Computing für C64 | Hannes1971 | Neuprogrammierung des Teach-In Ronoters aus FT der Ersten Generation für C64 in ROBO Pro. | 33 kB | ||
| Carillon Fischertechnik | Peter Damen (Poederoyen NL) | Carillon Fischertechnik: - When the Saints go marching on - Ozewiezewoze - Boeren-oogst-lied - Zag beren broodjes smeren - Den Haag - Daar was laatst een meisje loos - Alle Menschen werden Bruder - Vader Jacob - u.s.w. |
1.69 MB | ||
| Bagger | fish | Der Bagger wird über Bedienfeld oder IR-Fernbedienung gesteuert. Das für pneumatische Bagger ausgelegte Programm steuert: -Die Räder oder Ketten (Vor, Rück, Kurve rechts/links und Drehen rechts/links) -Den Baggerarm (Arm hoch/runter, Arm vor/zurück und die Schaufel aufnehmen/auskippen) -Als kleines Extra kann das Licht ein und ausgeschaltet werden und die Geschwindigkeit angepasst werden. Ein interresantes Programm, nicht nur für Bagger! |
560 kB | ||
| ft Dog | Richard Mussler-Wright | epub | This is a test set (my first effort) of ft instructions tailored for the noo ebook reader. This file is in an epub format. | 246 kB | |
| ft dog | Richard Mussler-Wright | This is a simple set of instructions tailored for the nook ebook reader in pdf format. Thought to share. | 259 kB | ||
| Anleitung h4 Grundbaustein | Thomas Habig | Nachbau Hobby 4 Elektronik Grundbaustein in drei Versionen mit ausführlicher Erklärung |
4.23 MB | ||
| Instructables Scorpion | Richard Mussler-Wright | epub | This is a building plan for a scorpion I developed for the Instructables Author Gift Exchange. I published these plans in an epub format and tailored it for the nook ereader. | 219 kB | |
| Instructables Scorpion | Richard Mussler-Wright | This is the scorpion model I developed for the Instructables Author Gift Exchange in a pdf. | 1.85 MB | ||
| ROBO Pro Programm Fahrstuhlsteuerung; siehe: Bilder Aufzug (Dirk Fox) | Dirk Fox | Das ROBO Pro Programm steuert mit einem Robo TX Controller einen Aufzug (drei Stockwerke) mit automatischen Schiebetüren, Lichtschranken und Ruftasten. Anschlussbelegung des Robo TX Controllers: siehe Beschreibung Bild "Gesamtansicht Aufzug mit Steuerung" unter "Aufzug (Dirk Fox)", Kategorie "Aufzüge". |
173 kB | ||
| Paketwendeanlage | Peter Poederoyen NL | Die Paketwendeanlage hat die Aufgabe, den Strichcode des Paketes zu erkennen und das Paket danach zur weiteren Bearbeitung weiterzugeben. Die Anlage besteht aus 8 Motoren, von denen 7 Motoren in Rechts- und Linkslauf und variabler Drehzahl betrieben werden müssen. Des Weiteren sind 2 elektropneumatische Ventile zur Steuerung des Geifers und diverse Endtaster montiert. | 369 kB | ||
| Kettenfahrzeug Version2 | Lutz-Günter Becke | Programmverbesserung zum vorherigen Programm von ft-Jan. Erläuterungen zum Programm stehen im Fenster Beschreibung. |
100 kB | ||
| Insektensteuerung | Patrick P. | Ein Programm, das einen sechsbeinigen Roboter ansteuert. Die Beine "denken" jedoch so, wie beim echten Insekt alleine und geben nur Befehle weiter, wann das nächste Bein anfangen soll. |
744 kB | ||
| Listensteuerung Hochregallager | Martin W. | Eine Erweiterung des ft-Beispielprogramms "Hochregal" aus Automation Robots. Die belegten Fächer werden in einer Liste (UP Liste_Faecher) gespeichert (0 oder 1). Entsprechend des gedrückten Tasters wird ein belegtes oder unbelegtes Fach gesucht (UP Fachsuche) und an das UP Platz_anfahren ausgegeben. | 850 kB | ||
| Essay_LED | Thomas Habig | Elektronik Grundlagen Essay über LEDs |
216 kB | ||
| Ansteuerungsprogramm für Lampen am IF | Lukas (Kieseleck) | Ein Programm zur Ansteuerung von den Lampenausgängen 01-07 per Bedienfeld (helligkeitsregelung möglich). Das Programm ist langsam, wenn es darum geht die Lampen schnell ein- und auszuschalten. Die beschriftungen und IDs sind von der Bühne. |
149 kB | ||
| Temperatursteuerung | lord_Unbekannt | Hier eine wirkungsvollere und größere Variante der Temperatursteuerung aus dem ROBO Starter. Ich bin bei den Lüftern auf Axaiallüftern umgestiegen, da diese leiser und besser zu befestigen sind. Bilder werden folgen. |
663 kB | ||
| Hintergrund für Netalk 6 | Lukas | bmp | An alle Nettalk-Nutzer: hier ein Hintergrung, passend zur ft:c! (zum verändern des Hintergrunds unter "Einstellungen" "aussehen" wählen, bei "Hintergrund verwenden" einen Haken setzen und schließlich Bild auswählen) |
1.77 MB | |
| Die Türme von Hanoi | Volker-James Münchhof (qincym) | RPP-Programme und PDF-Bauanleitung für "Die Türme von Hanoi" mit Impulszählung zur Positionierung und rekursiven Programmaufrufen. | 1.39 MB | ||
| Diverse Widerstandsberechnungen | Thomas Kaltenbrunner (Kalti) | Widerstandsberechnungen leicht gemacht: -Berechnung von Widerständen mit dm Ohmschen Gesetz Gleichstrom für Jeden leicht gemacht -Ersatzwiderstand berechnen einfach Werte eingegeben und der PC berechnet + anschließend Ohmsches Gesetz -Berechnen von in serie geschaltenen Widerständen + anschließend Ohmsches Gesetz |
73 kB | ||
| Zahnrad | Thomas Püttmann | Dateien zu meinem Artikel in der ft:pedia 1/2012. Enthalten sind ein Postscript-Programm zum Zeichnen von fischertechnik-kompatiblen Zahnrädern mit beliebig vielen Zähnen und eine Druckvorlage für ein Modell zum Verständnis der Evolventenverzahnung. | 143 kB | ||
| Konstruktion HP-GL-Plotter v1.1 (ft-designer) | Dirk Fox | 3D-Konstruktionszeichnung (ft-Designer) für den in ft:pedia 4/2011 vorgestellten HP-GL-Plotter, inklusive Bauteilübersicht. Siehe auch unter minimalistischer Präzisionsplotter). | 352 kB | ||
| Steuerprogramm HP-GL-Plotter v1.1 | Dirk Fox | Steuerprogramm (siehe ft:pedia 1/2012) für den in ft:pedia 4/2011vorgestellten HP-GL-Plotter (siehe auch minimalistischer Präzisionsplotter). Änderung zu Version 1.0: Nur noch eine HPGL-Datei erforderlich. | 901 kB | ||
| 3D-Konstruktion der | Dirk Fox | Konstruktion der "Bahnhofs"-Uhr (siehe Fotos im [url="http://www.ftcommunity.de/categories.php?cat_id=2580" target="_blank">Bilderpool"") als ft-Designer-Datei inklusive Kinematik-Simulation. | 7341 Bytes | ||
| 2-Zylinder Reihen-Druckluftmotor.zip | Andreas Gürten | 2-Zylinder Reihen-Druckluftmotor. Original von Fischertechnik Festo Pneumatik. | 185 kB | ||
| 3D-Drucker.zip | Andreas Gürten | 3D-Drucker mit Heißkleber. Eigentlich gibt es ihn auch hier: http://objects.reprap.org/wiki/Builders/FTIStrap. Nur der Vollständigkeit halber.Original von Andreas Rozek. |
337 kB | ||
| Codekartenleser mit automatischem Einzug.zip | Andreas Gürten | Codekartenleser mit automatischem Einzug. Original von Fischertechnik Profi Computing. Codekarte zum Ausdrucken anbei. | 40 kB | ||
| Druckluftmotor.zip | Andreas Gürten | Druckluftmotor. Original von Fischertechnik Festo Pneumatik. | 85 kB | ||
| Druckluftmotor mit Balancier.zip | Andreas Gürten | Druckluftmotor mit Balancier. Original von Fischertechnik Festo Pneumatik. | 162 kB | ||
| Druckluftmotor V-Form.zip | Andreas Gürten | Druckluft V-Motor. Original von Fischertechnik Festo Pneumatik. | 146 kB | ||
| Heu-Aufzug.zip | Andreas Gürten | Heuaufzug. Man kann damit Heuballen hochziehen, die dann automatisch in den Heuboden fahren. Dann kommt der Haken automatisch wieder runter. Original von Fischertechnik Hobby 1-2. | 22 kB | ||
| Zähler.zip | Andreas Gürten | Zähler. Original von Fischertechnik Hobby 1_2 Steuerungen 1. | 31 kB | ||
| Minimalistischer Präzisionsplotter Teil 1 | con.barriga | Bauanleitung zum von Dirk Fox konstruierten "Minimalistischer Präzisionsplotter". | 1.97 MB | ||
| Minimalistischer Präzisionsplotter Teil 1 | con.barriga | Bauanleitung zum von Dirk Fox konstruierten "Minimalistischer Präzisionsplotter". | 1.97 MB | ||
| DCF77-Testprogramme 1 und 2 | ftDirk | Dies sind die ersten 2 Testprogramme für die Entwicklung eines DCF77-Decoders mit RoboPro und dem TXC. Hier ist der Thread dazu: [url]http://forum.ftcommunity.de/viewtopic.php?f=8&t=1421#p9207 |
15 kB | ||
| Steuerprogramm HP-GL-Plotter v2.0 | Dirk Fox | Steuerprogramm (siehe ft:pedia 2/2012) für den in ft:pedia 4/2011vorgestellten HP-GL-Plotter (siehe auch minimalistischer Präzisionsplotter). Änderung zu Version 1.1: Vier Parameter, sechs neue HP-GL-Kommandos). | 956 kB | ||
| DCF77-Decoder v1.0 | Dirk Fox | Eine erste Version des DCF77-Decoders; zeigt im TX-Display Uhrzeit (Stunden:Minuten) und das Datum (Tag.Monat.Jahr) an. Synchronisiert sich minütlich neu. (Siehe den Thread im Forum unter http://forum.ftcommunity.de/viewtopic.php?f=8&t=1421). | 496 kB | ||
| Münzzähler Programm | Max Z. | Für den "Bastel-Freak" im Forum | 60 kB | ||
| I²C-Treiber für Ultraschall-Sensor SRF08 (Devantech) v1.0 | Dirk Fox | RoboPro-I²C-Treiber für den Ultraschall-Sensor SRF08 von Devantech inklusive Beispielprogramm (Vergleichsmessung von SRF08 mit fischertechnik-Abstandssensor). Näheres im entsprechenden Beitrag der ft:pedia 4/2013. | 425 kB | ||
| I²C-Treiber für Ultraschall-Sensor SRF02 (Devantech) v1.0 | Dirk Fox | I²C-Treiber für den Ultraschallsensor SRF02 von Devantech inklusive Testprogramm (Vergleichsmessung mit fischertechnik-Abstandssensor). Näheres im entsprechenden Beitrag der ft:pedia 4/2013. | 158 kB | ||
| Lanz-Bulldog Sammelprospekt 1937 | Peter Poederoyen NL | De Lanz Bulldog is een type tractor ontwikkeld door de Duitse fabrikant Lanz. Ontworpen door de Duitse ingenieur Fritz Huber, had de tractor een liggende één-cilinder tweetakt gloeikopdieselmotor. Door gebruik van deze ééncilinder had die een karakteristiek geluid, een staccato "boem-boem" geluid. |
810 kB | ||
| Konstruktion des | Dirk Fox | ftm | ft-Designer-Konstruktion des kleinen Wall-e (vorgestellt auf der Convention 2011; Modellfotos); inklusive einer Kinematik-Animation. | 55 kB | |
| mot3 | 3one5 | Anleitung Nr. 6 39132 5 zum Baukasten mot3 |
1.96 MB | ||
| ftdb-Datenbestand Januar 2013 | Stefan Falk | Diese ZIP-Datei enthält den vollständigen ft:db-Datenbestand Januar 2013 als CSV-Dateien: a) "Flache Stückliste.csv" ist für einfache Bedürfnisse gedacht. Darin sind zu den Kästen und enthaltenen Teilen jeweils die älteste und jüngste Artikelnummer aufgeführt. b) Im Unterordner "ftdb" findet sich ein Satz CSV-Dateien mit dem vollständigen Datenbankinhalt (bis auf Bilder und Dokumente selbst). Im Unterornder "Doku" befindet sich eine HTML-Datei mit der vollständigen Dokumentation der Datenbank von SF Parts, dem Windows-Programm für die Inhaltspflege der ft:db. Darin sind auch einige Tabellen wie Wiedervorlagen etc. enthalten, die die ft:db selbst nicht enthält, sowie viele interne Detailangaben, die ihr nicht benötigen werden - bitte einfach mit Mut zur Lücke verwenden. Bei allen Fragen am besten im Forum posten. |
3.16 MB | ||
| I2C-Treiber für Luftdrucksensor BMP085 | Georg Stiegler (fantogerch) | Treiber und Beispielprogramme für den I²C-Drucksensor BMP085 (siehe Beitrag in ft:pedia 1/2013). | 142 kB | ||
| Kugelbahn mit neuen Teilen aus Mobil-Kästen für FT-Designer | Johannes Visserr | Komplexes Modell mit Teilen aus dem Dynamik-Kasten (Kugelbahn) Besonderheit: Die Teile sind im FT-Designer aktuell noch gar nicht untersützt. Ich hab die Teile selber modellierit und in den FT-Designer eingefügt. Man muss die Bauteile aus den Ordnern im Zip-File in die entsprechenden Ordner des FT-Designers kopieren und dann sind die Teile da. Sollte Herr Samek (der Autor) die Teile irgendwann mal offiziell rausgeben, müsste man die Files wieder löschen, sonst tuts der Update nicht. Dabei ist auch eine Anleitung zum drucken und ein kleines WMV-Video, dass das Modell in Aktion zeigt. |
5.25 MB | ||
| Kugelbahn mit neuen Teilen aus Dynamik-Kästen für FT-Designer / Aktualisierung | Johannes Visser | Komplexes Modell mit Teilen aus dem Dynamik-Kasten (Kugelbahn) Besonderheit: Die Teile sind im FT-Designer aktuell noch gar nicht untersützt. Ich hab die Teile selber modellierit und in den FT-Designer eingefügt. Man muss die Bauteile aus den Ordnern im Zip-File in die entsprechenden Ordner des FT-Designers kopieren und dann sind die Teile da. Sollte Herr Samek (der Autor) die Teile irgendwann mal offiziell rausgeben, müsste man die Files wieder löschen, sonst tuts der Update nicht. Dabei ist auch eine Anleitung zum Drucken und ein kleines WMV-Video, dass das Modell in Aktion zeigt. Neue Teile 121641 Flexprofil blau, 38247 30x30 Platte rot 2 Zapfen, 38252 Kupplungsstück rot 5 Löcher, 143234 FlexProfili grün, 144262 Stahlkugel |
5.34 MB | ||
| Rührwerk | Johannes Visser | Kleines Modell von einem Rührwerk. Kann man mit den Kästen "Fischertechnik in der Schule" bauen (Grundschüler) inklusive PDF Anleitung zum Ausdrucken | 571 kB | ||
| Bandsäge | Johannes Visser | Kleines Modell einer Bandsäge. Kann man mit den Kästen "Fisichertechnik in der Schule" bauen. (Grundschule) mit PDF-Anleitung zum Ausdrucken |
711 kB | ||
| Hubschrauber | Johannes Visser | Einfaches Hubschraubermodell angelehnt an ein ähnliches Modell aus den original Anleitungen aus den 70ern. Kann mit den Kästen "Fischertechnik in der Schule" gebaut werden (Grundschule) mit PDF-Anleitung zum ausdrucken | 1.49 MB | ||
| Nunchuk-Steuerung für fischertechnik-Modelle v1.0 | Dirk Fox | I²C-Nunchuk-Steuerung für ft-Modelle (Fahrzeuge, Raupenantriebe etc.). Siehe Beitrag in ft:pedia 2/2013. Beispielanwendung für RoboPro-Nunchuk-Treiber (v2.0). | 25 kB | ||
| I2C-Treiber für Multiplexer PCA9544A | Georg Stiegler (fantogerch) | RoboPro-Treiber, um den I2C-Bus-Multiplexer PCA9544A am I2C-Port des TX zu nutzen. Ermöglicht z.B. Ansteuerung von bis zu 4 I2C-Komponenten mit gleicher Adresse. Näheres in ft:pedia 2/2013. | 11 kB | ||
| FT-Designer / DEF-Maker | Johannes Visser | DEF-Maker von Michael Samek. Dieses Tool dient als Hilfsmittel zur Erstellung der DEF-Datei (zentrales Element des FT-Designers) wenn man eigene Teile dem FT-Designer hinzufügen will. Das Tool wird wird in den Hauptordner des FT-designers kopiert und kann von dort gestartet werden. Michael Samek hat uns dieses Tool netterweise zur Verfügung gestellt unter folgendem Vorbehalt: Das Tool ist "as ist is". Es besteht kein Anspruch auf Vollständigkeit, Fehlerfreiheit. Die Anwendung geschieht auf eigenes Risiko. Eine detaillierte Anleitung ist in der FT:Pedia 3/2013 enthalten. |
385 kB | ||
| Rechenhilfe für Elektromotoren | H.A.R.R.Y. | Praktische Excel-Sheets mit / für + Motordaten einiger ft-Motoren (siehe Hinweise in der Datei!) + Vergleichshilfe + Vorlage f. Kennlinien Zur Unterstützung des ft:pedia Artikels über Kenndaten der ft-Motoren in Heft 3/2013. Das Hintergrundwissen ist dort zu finden. Die Sheets kommen ohne Makros aus. |
96 kB | ||
| ChipInside-Fischertechnik-Buch.zip | Volker-James Münchhof | Scan des Buches von Horst F. Haupt "fischertechnik PROFI COMPUTING Modellsteuerung mit dem Computer" von 1992 und Kopie der zugehörigen Software. Mit freundlicher Genehmigung des Verlages "Vogel Business Media GmbH & Co. KG". Bereitgestellt von qincym und FtfanClub. Zum Download aufbereitet von qincym. Buch : ChipInside-Fischertechnik-Buch.zip Software Floppy : ChipInside-Fischertechnik-Floppy.zip installiert: ChipInside-Fischertechnik-CHIP1292.zip |
54.56 MB | ||
| PneuHoogte Cosinus | Peter Poederoyen NL | Ein Robopro-Programm für eine Positionierung mit Potmeter zum Cosinus-Bewegung wie im Natur. Pneumatisch weil es mit eine -Kolben-Zylinder oder eine –Muskel grossere und schnellere modellen möglich sein. |
136 kB | ||
| BarCodeScanner RoboPro und VisualBasic 2010 | Andreas Gail | Hallo Fischertechnik-Freunde von Modellbau und Automatisierung! Die Dateien die hier gezeigt werden sind Beispiele wie der Fischertechnik RoboTX Controller programmiert werden kann, mit der Fischertechnik RoboPro Software oder mit Microsoft VisualBasic 2010 Express. Beide Arten der Programmierung machen ihren Sinn auf die eine oder andere Art. Probiert es aus. Das Projekt darf kopiert und weiterverteilt werden, immer unter Berücksichtigung der Rechte von Microsoft, Fischertechnik und anderen. Es würde von der Allgemeinheit sehr geschätzt werden, wenn die Ergebnisse der weiteren Arbeiten veröffentlicht würden, z.B. unter www.ftcommunity.de Es gibt keine Garantie, alles auf eigenes Risiko. Besonderer Dank gilt Carel van Leeuwen für grundlegende Informationen und Unterstützung. Besucht seine Seiten: http://nl.linkedin.com/pub/carel-van-leeuwen/11/ba0/504 http://web.inter.nl.net/users/Ussel-IntDev/ Dear friends of fischertechnik models and automation! The files shown here are an example to program the RoboTX Controller with Fischertechnik RoboPro software or with Microsoft VisualBasic 2010 Express. Both types of programming are making sense in the one or other way. Feel free to check it out. You can copy or distribute the project, but you must pay attention to the rights of Microsoft, Fischertechnik and others. To publish your results would be appreciated by the community, e.g. under www.ftcommunity.de No guarantee, all on your own risk. Special thanks to Carel van Leeuwen for basic information and support. Watch his pages: http://nl.linkedin.com/pub/carel-van-leeuwen/11/ba0/504 http://web.inter.nl.net/users/Ussel-IntDev/ Andreas Gail |
7.54 MB | ||
| simi | Simi | Ein total simples Programm . Wenn jemand die Tür aufmacht beginnt der Summer zu brummen. I1=Taster= Zum erkennen M1=Summer=brummen |
15 kB | ||
| Looping-Karussell_Steuerung | Pascal Jan (bauFischertechnik) | Mit diesem Programm kann man mein Looping-Karussell-Modell Steuern. | 773 kB | ||
| Fahrroboter mit GPS-Modul Navigatron und Compass CMPS10 v1.1 | Mark Oude Elberink & Georg Stiegler (fantogerch) | Programm für einen autonomen Fahrroboter wie hier vorgestellt <a href="http://forum.ftcommunity.de/viewtopic.php?f=6&t=2034&p=15246#p15264" target="_blank">GPS-Navigation mit dem TX</a>. Zusätzlich ein Programm zum Kalibrieren des Compass-Moduls CMPS10. _MOT -> Programm für "normale" Motoren _ENC -> Programm für Encoder-Motoren |
285 kB | ||
| Lichtsteuerung | Pascal Jan (bauFischertechnik) | Mit den Programm kann man mein Modell einer kleinen "Bühne" steuern | 834 kB | ||
| univInt2PIC | xbach | c-Programme und Layout für Microkontrollersteuerung eines alten FT-Interfaces |
250 kB | ||
| Dokument-Links nach Kategorie und Einführungsjahr | Stefan Falk | Dies ist das Ergebnis einer Abfrage an die ft:db mit Kategorie, Artikelbezeichnung, Jahr des Dokuments, Link zum Dokument und (soweit erfasst) das Jahr, ab dem der Artikel nicht mehr produziert wurde. Sortiert ist nach Kategorie und Einführungsjahr. | 408 kB | ||
| TX-Beispiel-Programme | Helmut Jawtusch | rar | Ich habe auf der Basis der TX-Treiber (23.2.2017) einige Programm für den TX-Controller (V1.30) erstellt für die Sprachen: c++, c#, Java, Terrapin Logo und c. Sie zeigen den grundlegenden Aufbau einfacher Robotik-Programme. In der nächste Ausgabe von ft:pedia gebe ich zu jedem Beispiel noch einige Hinweise. In c geschriebenen Programme können (als binär-code) in den Speicher des TX kopiert und dann von der firmware ausgeführt werden. |
58.45 MB | |
| TX-Fernsteuerung mit dem RPi | Raphael Jacob | Dies ist das Package für den ft:pedia Beitrag. Enthalten sind folgende Daten: -Alle Befehle als Text-Datei -Die eigentliche Software für den RPi -Die ROBOPro Software -Die Software Putty (zur SSH-Verbindung) |
298 kB | ||
| I²C-Treiber für Pixy-Kamera v1.0 | Dirk Fox | RoboPro-I²C-Teiber für die CMUcam5 (Pixy) für den Betrieb am TX Controller. Funktionen zur Farberkennung, Pan/Tilt-Steuerung, Erkennung mehrerer Objekte und Abstandsberechnung. Nähere Erläuterungen in ft:pedia 4/2014, S. 43-51- | 41 kB | ||
| Consul the Educated Monkey | Dirk Fox | ftm | Konstruktion der Multiplikationshilfe "Consul, The Educated Monkey" aus dem Jahr 1916 - ein kleiner mechanischer "Multiplikationsrechner" (Fotos siehe Bilderpool). | 16 kB | |
| Robo TX/TXT mit Tablet fernsteuern | DirkW | Mit den RoboPro Bedienelementen und einem Win 8.1 Tablet mit Bluetooth, könnt ihr bequem euer Modell fernsteuern. |
25 kB | ||
| Etiketten Stand 2015-03-16 | Stefan Falk | Diese Etikettenversion hat viele Neuigkeiten: - Die Bilder wurden von unnötigem weißen Rand beschnitten, sodass die Teile selbst größer erscheinen. - Sie stehen neben den Rohdaten als .xlsx und .csv auch als PDF, XLSX (Excel 2013) und DOCX (Word 2013) in den Formaten 40 mm x 18 mm und 45 mm x 15 mm bereit. - Der Artikeltext ist ein Hyperlink direkt zur Artikelvariante auf der ft:db-Website (auch wenn er nicht blau formatiert ist). Man kann ihn also in der PDF, in der Excel sowie (mit Strg) in Word anklicken und landet auf der ft:db-Website. - Jede Kategorie ist mit einem grauen Zwischenetikett mit der vollständigen Kategoriebezeichnung versehen. - Diese Kategoriebezeichnung findet sich in den PDF und in den XLSX auch als anklickbares Inhaltsverzeichnis wieder (PDF bitte aufklappen, XLSX auf Tabellenblatt 1). - Die Kategorien in der XLSX sind dort auch als Gliederungsebenen verankert und können also zu- und aufgeklappt werden. - In der ersten Version der Etiketten hatten die Bilder einen unerwünschten hellgrauen 1-Pixel-Rand; der ist weg. |
20.03 MB | ||
| Umrechner | Nicolas | dieses kleine Programm kann die große des FT-discovery-Set Balls in eine cm angabe umrechnen. Das Programm wurde zwischen 5-70 cm getestet. Damit es besser klappt sollte die Kamera nicht auf zu buntem Hintergrund verwendet werden. Sonst wird der Ball überhaupt nicht erkannt. | 57 kB | ||
| Schleifring_8x_v18.zip | Harald Steinhaus | Zu ftpedia Nr. 17 (1/2015): 3D-Drucker-Daten für den Schleifring mit 8 Bahnen | 12.86 MB | ||
| Schleifring_4x_v18.zip | Harald Steinhaus | Zu ftpedia Nr. 17 (1/2015): 3D-Drucker-Daten für den Schleifring mit 4 Bahnen | 6.95 MB | ||
| Pistenbully-Windensteuerung | Jörg Busch (ft-familie) | Regelung der Windendrehung, der Seiltrommel und des Spillkopfes einer Pistenbully-Winde. Winde reagiert nur auf die Seilspannung Pistenbully von Jörg aus ft-pedia 1/2015 |
399 kB | ||
| Pistenbully-Windensteuerung | Jörg Busch (ft-familie) | Regelung der Windendrehung, der Seiltrommel und des Spillkopfes einer Pistenbully-Winde. Winde reagiert nur auf die Seilspannung Pistenbully von Jörg aus ft-pedia 1/2015 (Mit Erklärung der Variablen unter Beschreibung) |
400 kB | ||
| I²C-Treiber für 6-achsen MotionTracking Sensor | chehr | Erweiterung für den I²C Treiber MPU-6050 / 9150 mit folgenden Eigenschaften: 1. Motion detection (Bewegungsmelder) +X, -X ,+Y, -Y, +Z und -Z Achse. 2. Einstellung der Sensitivität und Dauer. Ideal als Kollisionszähler, z.B. für den Fischertechnik Flipper Programmiert in ROBO Pro V4.1.6 |
202 kB | ||
| ftrobopy | Torsten | Python Modul zur Ansteuerung des fischertechnik TXT Controllers ueber ein Python-Programm. Das Modul kann mit allen Betriebssystemen genutzt werden, die Python2.7 und POSIX Sockets unterstuetzen. Dazu gehoeren z.B. Linux und Mac OS X Systeme. Entweder wird die Datei ftrobopy.py in das site-packages Verzeichnis des Systems kopiert, damit sie automatisch gefunden wird oder man kopiert die Datei in das gleiche Verzeichnis in dem man auch seine Python-Programme zur Steuerung des TXT hat. |
153 kB | ||
| ball on a plate - Ballbalancierer zweidimensional | techum / FTmodels | Robo Pro Programm zu Youtube Video https://www.youtube.com/watch?v=1ObdFOjeSV4 Das Programm nutzt in zwei Dimensionen den Algorithmus des ball on a beam. Leichte Unterschiede bei der Auswertung der Ballgeschwindigkeit und insbesondere der Richtung.. Meine Programmiererfahrung mit Robopro hält noch sich sehr in Grenzen, auch habe ich mich mit der PID Controller Theorie nicht auseinandergesetzt. Es geht also sicher viel besser. Der Aufbau ist simpel, vielleicht hat ja jemand Lust das ganze zu verbessern, so dass es dann so funktioniert: https://www.youtube.com/watch?v=uERF6D37E_o |
0.96 MB | ||
| I²C-Treiber für Temperatursensor MCP9808 v1.0 | Dirk Fox | RoboPro-I²C-Teiber für den Temperatursensor MCP9808 am TX(T) Controller. Auflösung 0,0625°, Genauigkeit 0,25°. Nähere Erläuterungen in ft:pedia 4/2015, S. 44-48. | 21 kB | ||
| einfaches Regal für fischertechnik | Jörg-Peter | Dies ist der Bauplan für eines der beiden in der ft:pedia 4/2015 vorgestellten Möbelstücke für die Aufbewahrung von größeren oder kleineren fischertechnik-Sammlungen. Der Plan stellt mit Schritt-für-Schritt-Bildern vor, wie man mit wenig und preiswertem Material und ohne großen Maschinenpark ein Möbelstück bauen kann, das sich leicht in die eigene Wohnsituation einpassen lässt. Alle benötigten Teile sollte man in jedem Baumarkt bekommen, und der komplette Nachbau ist mit einigen Stunden Zeitaufwand auch für Anfäger zu schaffen. |
3.32 MB | ||
| DCF77-Decoder V5 | ftDirk | Nach längerer Zeit gibt es nun auch meinen DCF77-Decoder V5, den ich in der V4 schon am 10. August 2012 vorgestellt hatte. Eine Neuauflage wurde mit den neuen ROBOPro Versionen (4.1, 4.23) erforderlich: Das Timing des Decoders (Kalibrierung) musste angepasst werden. Bei der Gelegenheit habe ich noch ein paar Details verändert. Erfolgreich habe ich den DCF77-Decoder V5 jetzt auch mit dem TXT Controller getestet. |
57 kB | ||
| Schaltschema Robo TXT Controller I2C mit 5 Volt Sensoren | Dirk Wölffel | Robo TXT Controller mit RoboPro 4.2.3 Ansteuerung von I2C 5 Volt Sensoren. |
13 kB | ||
| Speedtest V1.0 | ftDirk | Das Programm Speedtest V1.0 versucht zu ermitteln, wie schnell ein ROBOPro Programm ausgeführt wird. Die Geschwindigkeit der Programm-Ausführung ist in erster Linie vom verwendeten Controller abhängig: ROBOTICS TXT Controller -> USB: 401 Download: 35 (mit angeschlossener USB-Kamera: 39) ROBO TX Controller ----------> USB: 1990 Download: 3142 (im Flash: 3207) ROBO Interface (93293) ----> USB: ....? RS232: ....? Download: ....? Intelligent Interface ------------> RS232: ....? Download: ....? Zusammenfassung der aktuellen Ergebnisse: 1. Der TXT führt Programme online fast 5x schneller aus als der TXC 2. Der TXT führt Programme im Download-Modus fast 90x schneller aus als der TXC 3. Der TXT führt Programme im Download-Modus über 11x schneller aus als online 4. Der TXT führt Programme im Download-Modus mit angeschlossener USB-Kamera etwas langsamer aus als ohne USB-Kamera 5. Der TXC führt Programme im Download-Modus nur mit 2/3 der Online-Geschwindigkeit aus (a) 6. Der TXC fürhrt Programme im RAM etwas schneller aus als im Flash Anmerkungen: (a) Sehr stark abhängig von den ausgeführten Befehlen, d.h. nicht allgemeingültig! Die Werte können dazu benutzt werden, um in einem ROBOPro Programm festzustellen, auf welchem Controller das Programm läuft. Dies kann für die Auslegung zeitkritischer Funktionen benutzt werden, damit diese auf unterschiedlichen Controllern identisch arbeiten. Beispiel (einfache Verzweigung): Z > 1200 ---> J: ROBO TX Controller ---> N: ROBOTICS TXT Controller |
7063 Bytes | ||
| TX-Treiber | Helmut Jawtusch | rar | Die Treibersammlung unterstützt den TX Controller V1.30. Ergänzt wurden Befehle für das GPS-Modul Navigatron und die Kamera Pixy-CMUcam5 am i2c-Port (EXT2). Enthalten sind Wrapper-Dateien für Java, Dateien zur Einbindung in c++ und eine Spracherweiterung für TerrapinLogo. Weitere Informationen enthält die Seite von Ulrich Müller unter Sonstiges. | 385 kB | |
| MiniBots vorläufige Schalterstellungen | fischertechnik/Stefan Falk | Aus dem im PDF verlinkten Forumsthread habe ich die Antwort von fischertechnik in eine PDF gebracht. Vielleicht ist das ja für jemanden nützlich, der sich das gerne ausdrucken möchte. Eine offizielle PDF von fischertechnik soll ja noch kommen. | 403 kB | ||
| I²C-Treiber für VCNL4010 Entfernungs- und Lichtsensor | chehr | Der VCNL4010 Sensor ist ideal, wenn sie Ihrem fischertechnik-Projekt einen Näherungssensor für kurze Distanzen von 1 bis 200 mm hinzufügen wollen. Auserdem verfügt er auch über einen eingebauten Lichsensor. Programmiert in ROBO Pro V4.2.3 |
184 kB | ||
| Trainingsroboter | nicolas kurz | Das Programm berechnet x-, y- und z- koordinaten (nur lineare bewegungen, keine rotationen) in 4 Drehwinkel/Anstellwinkel des Ft trainingsroboters und andere Industrieroboter mit gleicher prinzipieller konstruktion: drehbar gelagerter Oberwagen, oberarm, unterarm und Handgelenk. Die Längen für Ober und unterarm können den eigenen Bedürfnissen im UP "Start" angepasst werden. |
364 kB | ||
| I²C-Treiber LED und Servoansteuerung Version 1.0 | chehr | RoboPro I2C Treiber für 16 Servo- oder 16 LEDs die dann über RoboPro gesteuert werden können. Programmiert in ROBO Pro V4.2.3 Unbedingt Hinweise im Forum beachten! |
728 kB | ||
| Anleitung fischertechnik 3D-Drucker 2008 | Peter Damen (Poederoyen NL) | Anleitung fischertechnik 3D-Drucker 2008. Viele Weblinks sind leider entfernt. |
2.94 MB | ||
| 3D-Drucker 2008 | Peter Damen (Poederoyen NL) | Weil die Weblink zum Anleitung zum fischertechnik 3D-Drucker 2008 (leider) entfernt ist, habe ich dieser in PDF geupload. | 2.94 MB |
{kind=link}
{kind=link}
Wiki / FAQ:
Was ist Wiki?
Fan-Club-News: fischertechnik im Internet
FAQ: Forum
FAQ: fischertechnik
FAQ: Chat
Fan-Club-News: Treffen in Maarn(NL)
FAQ: Chat mit Nettalk
FAQ: Bilderpool
Convention: Texte
FAQ: Filme im Bilderpool
Programmieren des Robo-Interface in C
SF ft Community Publisher 1.0 Bedienungsanleitung
FAQ: RoboPro
Analyse des Robo upload Protokolls
RoboPro: Kommunikation via serieller Schnittstelle mit dem PC
RoboPro message command format for serial communication
Combining RoboPro with C
FAQ: Fotografieren von ft-Modellen
Fast counter
IR on RI (or IR Control Set and the Robo Interface)
Zubehör Teile für ft (Elektronik, etc.)
Daten von ft-Motoren
RC5 Codes für IR Contol Set 30344 (für den schwarzen Empfänger)
Modulanlage für Tischtennisbälle
Ping Pong Module Contraption
Links:
Allgemein
Fanseiten
Händler
Modellideen
Technik
Bugtracker:
Thumbnails in Bilderpool defekt
Fehler im Clickstream bei den Fanstandorten
Login/Out funktioniert in ftconvreg noch nicht richtig
Searchbox soll weg
W3C
Massenupload von Fotos
marmac.de.vu in die ftCommunity integrieren
Bugtracker loggt automatisch aus, erneutes einloggen erzeugt nen 404er
Menu - Script überarbeiten / Adminpanel programmieren
Bugtracker - Clickstreamfehler
Bugtracker - farbliche Kennzeichnung des Status
Bugtracker - Einträge auf mehrere Seiten verteilen
Bugtracker - eMailadresse sollte eingegeben werden können!
Wiki: Diff
3 Einträge wurde gelöscht im bugtracker
Clickstreamänderung bei Menufunktion
Download E-Bausteine
Link funktioniert nicht
Anmeldeformular für Werksbesichtigung
Pflichtfelder im Uploadformular kennzeichnen
Keine Fehlermeldung beim Bilderupload, wenn Felder vergessen wurden
Menu passt beim Aufklappen nicht mehr ins Layout!
Subdomain faq.ftcommunity funktioniert nicht
User bei mehreren Bildern gleichzeitig ändern!
Fehlermeldung bei Autothumbnails
ftCommunity Newletter
Nicknames bei Convention-Registrierung
Dynamische Seitentitel
Design: Links-obere Ecke farbig hinterlegen
Neue Bilder
weißer Hintergrund zu grell :(
anständiges Foto ins Impressum
Anker Tags in den Bilderpool einbauen
Eine Kategorie sollte man nur 1x anlegen können
Downloadbereich in Suche integrieren
Dateiupload tut bei größeren Dateien nicht
Downloadsbereich überarbeiten
Mehrsprachigkeit auch bei den Kommentaren im Bilderpool
Größe des Dataverzeichnisses mit in Statistik aufnehmen
Userlevel Admin einführen
Bilder
Fanstandorte
Fotograf/Konstrukteur vertauschen
Forum-Referrer auf Bilder-Seiten anzeigen
Kommentare
Link zu "alle Kommentare" auch ganz oben
Terminliste aktualisieren / archivieren
Kategorie löschen
Komentar
Porträt des Konstrukteurs neben dem Namen
Jedem Konstrukteur ne eigene Seite
Bilderpool mehr in den Mittelpunkt rücken.
Markierungen auf Fotos
Upload in Hauptkategorien unterbinden
Alle Katgorien eines Benutzers
Markierung ob Bild einen Kommentar hat
FT Marketplace
HTML Code für Videos
Andere Sortierung im Bereich Downloads
Chat-Anzeiger
ftCommunity als WAP Seite
"Bild kopieren" übernimmt Anzahl der Kommentare, aber die Kommentare nicht
Technische Info von Wilhelm Klopmeier kann man nicht sehen
Link zu SMDV
LOGIN Probleme
alte Forum
Suchfunktion für Kommentare
Menüstruktur überarbeiten
Verstellbare Tumbnails
Nur in der Vergangenheit
Anzahl der Bilder im Bilderpool im Profil
PN schreiben an ftc- User
Suche nach Konstrukteur sollte nur nach Konstrukteur suchen
Kategorieauswahl bei Bilderupload
Hochgeladene zip-Datei erscheint nicht
bitte Linktext "ftDatenbank" umbenennen in "ft-Datenbank.de"
Verbesserungsvorschläge von fish
Navigation
Zugriffe Bilder einbauen
Bevorzugung Konstrukteursnennung über Fotografennennung in Thumbnailansicht
Suche einschränken auf Konstrukteur/Kategorie/Titel/Beschreibung/Kommentar, Mehrfachennnung
Bildattribut Konstrukteur mit Benutzerliste abgleichen und ggf verlinken
Version 1.1 der Treiber RTC_Treiber DS1307 freischalten
Probleme im Dowloadbereich
Fehlerhafte Programmversion BMP085 bitte löschen
Suchfunktion erweitern
Bilddarstellung "mehr als 9"
"noch nicht entschieden"
Link funktioniert nicht mehr....
weitere Seiten:
geschichte
start
Verein
Adventskalender2011
impressum
dokumentation_fanstandorte
etec
freespeedjoy
freespeedspeech
schritt
ftpedia
datenschutz
Nordconvention
ftpedia_Artikeluebersicht